

DistOrtion_Camera相机标定文件模板通常包含以下内容:,,1. 相机内参矩阵(K):包含焦距(fx, fy)和主点坐标(cx, cy)。,2. 畸变系数:包括径向畸变(k1, k2, k3)和切向畸变(p1, p2)。,3. 旋转矩阵(R)和平移向量(t):描述相机在世界坐标系中的位置和姿态。,,这些参数用于纠正图像畸变,提高计算机视觉任务的准确性。
DistOrtion_Camera 相机标定文件模板

(图片来源网络,侵删)
1. 基础信息
| 项目 | 描述 |
| 相机型号 | (Canon EOS 5D Mark IV) |
| 镜头型号 | (EF 2470mm f/2.8L II USM) |
| 分辨率 | (3040 x 4056) |
| 传感器尺寸 | (36 x 24 mm) |
| 像素尺寸 | (0.0065 x 0.0065 mm) |
| 焦距 | (50mm) |
| 光圈 | (f/8) |
2. 标定环境设置
2.1 标定板参数
| 项目 | 描述 |
| 棋盘格大小 | (7x9) |
| 方格尺寸 | (30mm) |
2.2 拍摄条件
| 项目 | 描述 |
| 照明 | (室内自然光) |
| 背景 | (单色,无反光) |
| 距离 | (相机距离标定板1米) |
3. 标定过程

(图片来源网络,侵删)
3.1 图像采集
确保标定板在画面中清晰可见。
从不同角度和距离拍摄多张图片(建议至少20张)。
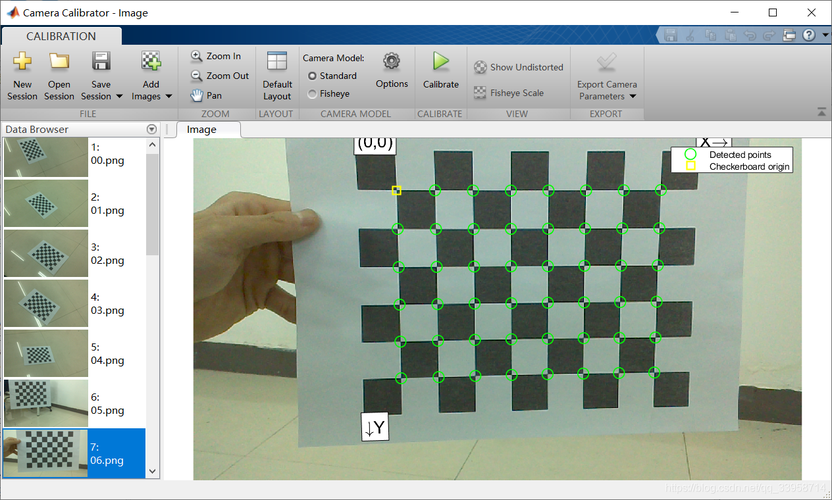
3.2 软件处理
使用标定软件导入拍摄的图片。
(图片来源网络,侵删)
软件自动或手动识别标定点。
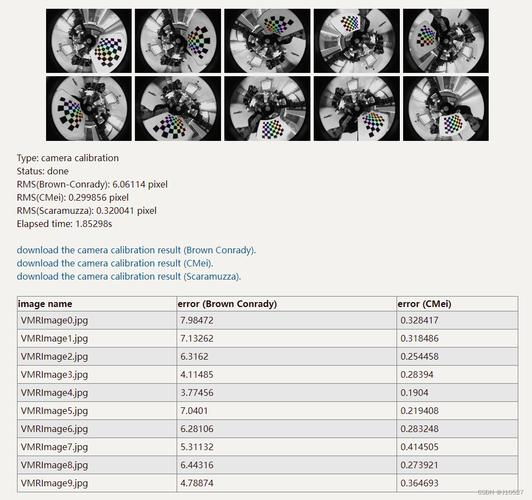
根据识别结果计算内参、外参及畸变系数。
3.3 结果验证
使用计算出的参数对新的图片进行校正。
检查校正后的图片是否有改善。
4. 标定结果
4.1 内参矩阵(K)
K = [fx, 0, cx]
[0, fy, cy]
[0, 0, 1]
4.2 畸变系数(D)
D = [k1, k2, p1, p2, k3]
4.3 外参矩阵(R & T)
R: 旋转矩阵
T: 平移向量
5. 相关问题与解答
Q1: 如果标定结果不理想,我应该怎么办?
A1: 如果标定结果不理想,首先检查拍摄的标定图片是否清晰,标定板是否平整且完全展现在图片中,确保从多个角度和距离拍摄了足够数量的图片,重新进行标定过程,必要时更换标定软件或方法。
Q2: 如何判断相机标定是否成功?
A2: 标定成功后,使用得到的内参和外参对新图片进行校正,校正后的图像应该在几何上更加精确,直线不会弯曲,图像边缘没有明显畸变,可以使用重投影误差来量化评估标定的准确性,误差越小,说明标定越成功。
原创文章,作者:K-seo,如若转载,请注明出处:https://www.kdun.cn/ask/565542.html
 微信扫一扫
微信扫一扫